


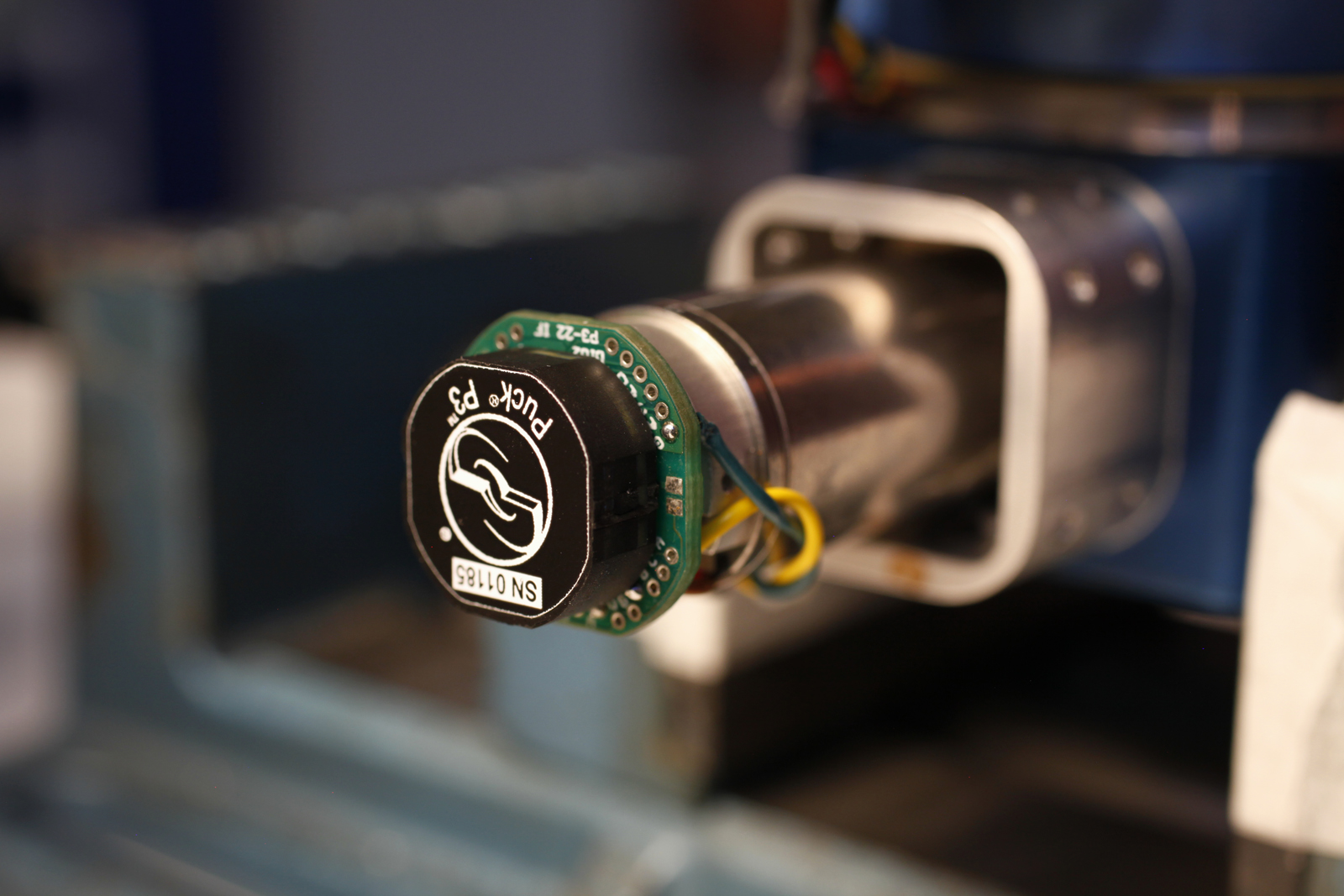
The Puck® P3™
actual size is 17.8-mm wide
So many features,
so very small
The Puck® P3™ is an ultra-miniature, high-performance brushless servomotor controller that simplifies complex multi-actuator designs! It is easily integrated into any application requiring maximum power efficiency, low mass, and compact size. The revolutionary Puck® P3™ is networked with an integrated encoder and precision current sensor. It controls the torque output of a brushless servomotor with state-of-the-art space-vector commutation and low torque ripple.
• An all-in-one solution
• Built-in encoder eliminates wiring rat’s nest
• 6X smaller than the next-smallest competitor
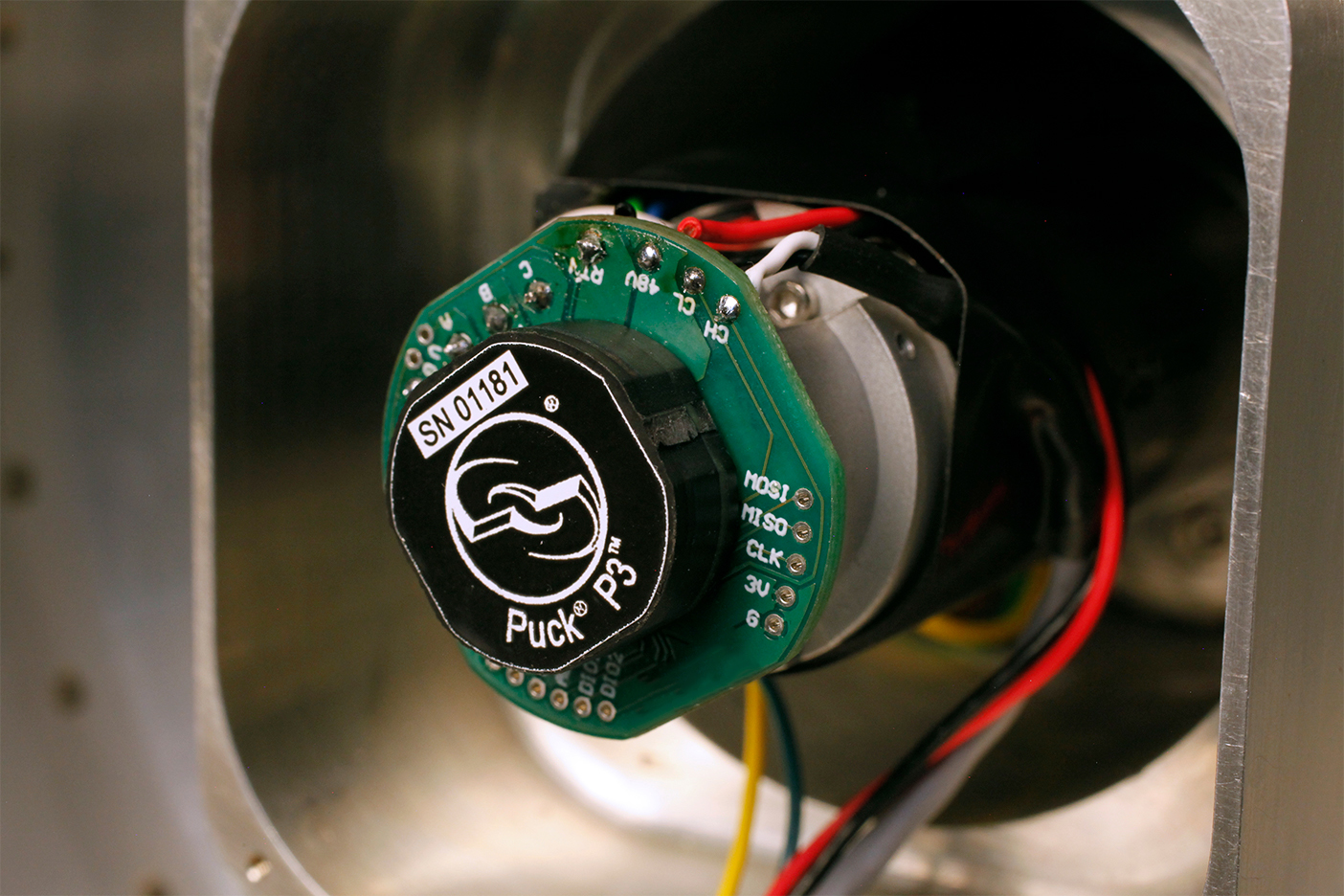
The Puck® P3™ in action



Features and Specifications
High-speed CANopen communication with software-controllable termination resistor
4 (or optionally 5)-wire bus topology: 2-wire CAN, Motor power 12-50 vdc, Ground, Logic power (optional)
Up to 31 controllers/bus
Built-in magnetic encoder (absolute, 0.1° precision)
5- and 3.3-vdc auxiliary outputs
Integrated current sensing
Space-vector commutation
32-bit floating-point processor
Low torque ripple
Quiet, fanless operation
Internal temperature sensing
In-system field-upgradeable firmware
(Optional) Digital Hall-effect inputs
Adjustable PWM frequency
Motor-temperature sensing
Dual analog inputs (16-bit)
Up to 4 digital I/O
External encoder capable:
SPI or quadratureSPI master peripheral support
Competitor Comparison

Technical Sheets

CAD files


This Model shows the top level of the assembly that shows P3 in relation to both the spinning magnet and the MIB (Motor Interface Board). ~8MB download.

More Information
The Puck® P3™ is a networkable high-performance brushless single-axis motion controller and amplifier with an integrated encoder and precision current sensing. It controls the torque output of a brushless servomotor with state-of-the-art space-vector commutation and low torque ripple. You can also command velocity, position, or give the controller a target position to reach using its built-in trapezoidal velocity controller.
P3 is the product of two decades of design, development, testing, and refinement of the motor controllers used in our own robots. With a volume of only 1.9 cm3 and a total weight of only 4 grams, Puck® P3™ is designed to replace a standard motion controller and amplifier while taking up less space than a typical encoder. When mounted directly onto the motor body, the close proximity of the controller eliminates the encoder-to-controller wiring issues encountered with standard motion-control setups such as wire routing, connectoritus, signal degradation, EMI, I²R power losses, and cable bulk.
Up to 31 P3s may be networked together on a single, easy to manage, 4- or (optionally) a 5-wire bus. Two wires are used for robust, industry-standard CANopen communications. One wire supplies motor power, one wire is a ground, and an optional 5th wire can supply logic power separately.
Puck® P3™ controls a wide range of motor voltages from 16 to 50 vdc without any reconfiguration. It is designed to command a smooth, continuous torque, even when the input voltage is unstable.
Please contact Barrett's experts at sales@barrett.com to see if the Puck® P3™ is a good solution for your OEM application.

Avoid the rat’s nest of wires!
Puck® P3™ is an all-in-one solution so you don’t have to deal with the mess of wires and connectors.